


A few weeks ago I wrote about the Verge TS: an electric motorcycle with, according to the manufacturer website, a torque value of 1000 Nm. That’s about 7 times as much torque as BMW reports for the 1250 GS (143 Nm). As you might know, the BMW 1250 GS is known for its very torque engine and, even though electric engines are typically very torque too, this seems a bit much indeed. So, I got a few comments on that statement 🙂.
One of the comments mentioned that gear ratio was not taken into account with these values. This triggered me to do more research. I was assuming that horsepower and torque values were standardised in the motorcycle industry. In other words that they would all be measured in the same way so as to report comparable values to consumers. Otherwise, what would these values mean?
Turns out that this is only partially true. There is a more or less general consensus on how (and where) torque and horsepower should be measured for traditional motorcycles, but each manufacturer measures and interprets torque and power in his own way and thus can report values to their favour. With electric motorcycles entering the arena this becomes even more blurry as they can’t measure torque and horsepower in the same way as traditional motorcycles.
The Physics
Before we get into how (and where) torque and horsepower are typically measured on motorcycles, let’s first have a look at the physics of it all.
Torque
Torque is rotational force. It’s calculated by Force x Radius. Torque of 100 Nm (Newton-meter) means that at a 1 meter radius a force of 100 Newton can be applied, which is the same as being able to apply a force of 73.7 pounds at a radius of 1 foot. Nm (Newton-meter) is the metric unit for Torque. lbf ft (often listed as ft-lb, foot-pounds) is the imperial unit.

This means that torque can be increased or decreased by changing the radius. This is important! More on that later!
Power
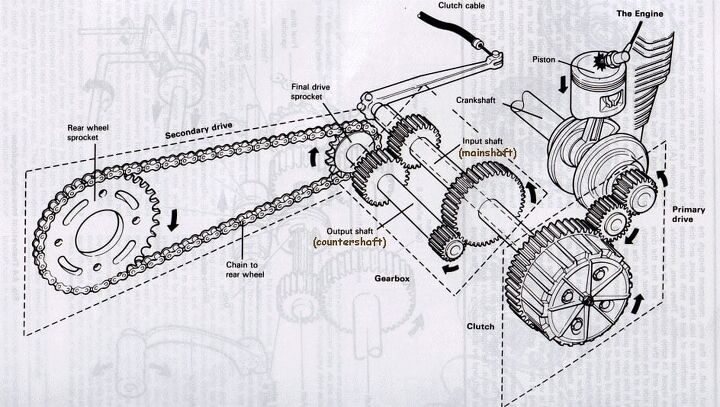
Before we can explain Power we first have to talk about Work. Work is what happens when you exert a force through a distance. Without movement there can be force, but there can not be work. For example, when you push against a heavy truck you are applying force, but, unless the truck moves, you are not doing any work. Only if the truck moves you are actually doing work, i.e. you are producing movement. Translating this to the sprocket picture above… it’s only producing work if it’s turning around.
Now we get to power. Power is the ability to do work over time. If you can do more work in less time you are more powerful. The more power you have the less time it takes to do some amount of work. For example, the more power a motorcycle has, the less time it takes that motorcycle to go from 0 to 60 mph. (This is actually not entirely true as torque and gearing also plays a big part in acceleration as we’ll see later)
Power can be expressed and calculated in several ways. In electricity we often talk about Watts, but in motor vehicles we mostly talk about horsepower. So, horsepower is a unit of power.
Power vs Torque mathematics
Intuitively we already know that torque and horsepower are related, but they are not the same. First, let’s translate above text to math:

So, Power, in the end, is the product of Torque and Speed. Torque is rotational force so we also express speed in rotational speed…RPM!
The Applied Physic
Now that we’ve covered the basic physics, let’s see how this translates to motorcycles.
Horsepower
To get to horsepower, we need to get our units straight first. For rotational speed we use RPM (revolutions per minute). That’s how many times the engine crank shaft rotates per minute. The engine crank shaft is the shaft that is being rotated by the engine pistons moving up and down. It’s the very first part of the drivetrain that rotates.
{kind=link}
As torque is generally reported in one of two units, the metric Nm and the Imperial ft-lb, we have to use a slightly different formula to get to Horsepower, depending on the Torque unit:

SIDENOTE: Notice the hp(i)? This is the imperial horsepower. The imperial horse is stronger than the metric horse hp(m) 😉. To equal the strength of 100 imperial horses you need 101,43 metric horses. This is one of the tricks some manufacturers use to fluff the numbers. By reporting horsepower in hp(m), the number is higher. And of course that (i) and (m) is often left out.
Horsepower vs Torque
Now we are getting to the core of it. So, horsepower is not the same as torque. As mathematically stated above, they are related by RPM. But, we also know that torque itself is not constant across a motorcycle rev range. Torque, as measured at the crank shaft, is dependent on the force that the pistons apply to the shaft, which, in turn, is dependent on the little explosions above the piston head. And the force of those explosions depends on several things, amongst others how big the space above the piston is and how many cilinders an engine has (engine capacity), how potent the gasoline/air mixture is, how efficient the mixture can enter and exit the chambers above the pistons, how efficient the mixture can be ignited, etc. Most of those properties are dependent on speed, i.e. depend on the speed at which the explosions need to repeat, thus, torque is also engine speed (RPM) dependent.
Torque can be manipulated
Typically motorcycle riders like a ‘flat’ torque curve; meaning that they would like the same amount of torque throughout the rev range of the motorcycle. Motorcycle manufacturers know this and over the years have used and invented numerous techniques to manipulate torque. Think of the rather new (but not really) BMW shiftcam technology to be found in the R1250 boxer engines. This basically makes the valve timing a variable of the rev range. And then there’s Honda’s well known VTEC technology that opens up a few more valves at about 7000 RPM. There are a bunch of other techniques, but you get the point.
These advanced techniques are not the only way torque can be manipulated. Remember the remark below the first picture… “torque can be increased or decreased by changing the radius“? The most simple way that torque is manipulated is through gearing. E.g. the chain sprockets on our motorcycle and the gears that we shift between. In the end it’s all about the torque that gets to the rear wheel.
Increasing torque comes at a cost though. Take the two chain sprockets on our motorcycle for example.

To increase the torque at the rear wheel, the rear sprocket is larger than the front sprocket. In other words, the radius of the rear sprocket is bigger. Bigger radius with same force means higher torque. This also means that, in order to rotate the rear sprocket one rotation, the front sprocket needs to rotate multiple times. In other words, to turn the front sprocket 1 rotation is less work than turning the rear sprocket 1 rotation. In other words, the front sprocket (and therefore the crank shaft) needs to turn faster (higher RPM ), needs to work harder, to achieve the same amount of rotations with higher torque.
We could chose to make the rear sprocket the same size (or smaller even) as the front sprocket. That would mean less torque at the rear wheel, but you’d also need less RPM for one rotation so you’d be able to go faster, eventually.
In the end there’s a delicate relation between torque and RPM. The higher the torque at the rear wheel, the faster you can accelerate (theoretically as at some point the wheel will start slipping of course) but you’ll reach the engine’s max RPM quicker, so your motorcycle’s top speed would be lower (leaving gears out of the discussion for simplicity). Manufacturers spend a lot of time and money on research to get this exactly right for the type of motorcycle they are developing. They have a lot of ‘dials’ to turn to get the right balance, but of course it all starts with the engine capacity and efficiency. I.e. how big and efficient the explosions above the piston heads are.
How standardised are the numbers
This brings us to the title of this article. How are torque and power values measured and how standardised are the numbers? Well, the general consensus is that reported torque and power values are values at the crankshaft. As seen above, the crank is the first point where rotational force is created. For cars that is measurable because the transmission sits outside of the engine in a car. However, on a motorcycle you typically can not measure at the crank shaft because the engine casing also contains the primary drive and the transmission. The first rotational force that can be measured is at the countershaft where the sprocket sits.
So, typically the first opportunity to measure horsepower of a motorcycle is at the countershaft, well after the crank. Manufacturers have their own engine dyno’s and do their own measurements and then, if not able to directly measure at the crank shaft, translate the counter shaft values to crankshaft values. Needless to say that not every manufacturer does this in the same way.

These crankshaft values are not the same as rear wheel values. Rear wheel power is measured by other kinds of dyno’s, which are often used to tune motorcycle performance, or by journalists to get real life, more comparable, values 🙂.

Crankshaft vs rear wheel values
So, manufacturers typically report power and torque at the crankshaft. But, these are definitely not the same as the values you get at the rear wheel. There is quite some performance loss through the drive train. Typically between 15% and 20%. This depends on many factors, the sort of drive being an important one. Chain drives are usually a bit more efficient compared to shaft drives. And belt drives are more efficient than chains. And it also depends on how ‘favorable’ manufacturers report the numbers. For example BMW is known to report quite realistic.
Torque measured at the rear wheel?
Yes, it’s possible to measure torque at the rear wheel using a Dyno, but please keep in mind, as we discussed above, torque can be manipulated quite easily by changing radius, like gears do for example. What torque value, of what gear would you like to compare? Perhaps of all gears? That’s not really practical (or at least not common practice), so mostly torque at a ‘rear wheel’ dyno is calculated back to torque at the crank shaft (because dynos measure Power and we know the revs, torque at the crankshaft can be calculated from that easily… and that is also the value you see in the common dyno charts)
Some people will then initially think, the lower the gear, the more torque, so the more Power we will make, but this is not true. Remember the formula for calculating Power? Power is dependent on torque and RPM. So if we use a lower gear ratio, the corresponding rear wheel RPM will be reduced by the same factor as the Torque is increased, so we end up with the same power. This is a pure math.
Conclusion
Horsepower vs Torque. Why report both at all? Is Horsepower not enough? Well, no, not really. Because a high horsepower value can come from high torque or from high RPM. So, having both torque and horsepower values tells you how hard you need to rev an engine to get moving. A high horsepower value with a very low torque value is an indication that you’ll need to rev that engine hard. It probably also means that first gears are very short in order to go up the rev range fast to achieve a decent amount of torque for acceleration.
So, does that mean that torque is a measure for acceleration? Well, rear wheel torque YES, but crankshaft torque, not exactly, but almost. In my opinion, for the sake of simplicity, you can make that assumption when comparing motorcycle specs! Crankshaft torque is actually a measure for the potential of acceleration, because acceleration depends on crankshaft torque and how torque is changed through radius changes in the drive train, e.g. gearing. Furthermore, acceleration also depends on other factors like weight and aerodynamics of the motorcycle.
Consider this conceptual example… Let’s say we have two identical motorcycles, both have 100 horsepower, same gearing, same weight, etc. There’s only one difference. Motorcycle A has 50 Nm Torque, while motorcycle B has 100 Nm of Torque. What does this mean? Well, this means that motorcycle B can accelerate twice as fast at the same rev range. It means that motorcycle A needs to rev twice as hard compared to motorcycle B in order to achieve the same acceleration.
So, torque and horsepower are both important. Actually, for the real number geeks, you’d want to see the power and torque plotted against the rev range, because the single numbers reported by manufacturers are peak numbers that are reached at a certain RPM value.
Typically a higher torque value means that you’ll feel more ‘grunt’, more brute force, in the lower rev ranges because that engine can generate more rear wheel torque while the engine is still low in its revs, while a lower torque means that the engine needs to reach higher revs first to get to the same amount of rear wheel torque.
We still did not address how this all applies to Electric motorcycles. Obviously they don’t have explosions and pistons. Some don’t even have a crankshaft like the Verge TS mentioned at the start of this article. So, how and where is horsepower and torque measured for Electric motorcycles. Well… that’s a topic for another time. But, if you can’t wait, here’s an article from the motorcyclists about torque in eBikes. This article mentions that on a typical traditional 1000cc motorcycle, the rear wheel torque is about 10 times as high as the crankshaft torque IN FIRST GEAR. And, the BMW has 143 Nm reported crankshaft torque / 106 Nm measured crankshaft torque. That gives the BMW 1430 Nm reported torque and 1060 Nm measured torque at the rear wheel. That’s MORE than the Verge TS, again… IN FIRST GEAR. As you go up in gears (rear wheel) torque is ‘sacrificed’ for speed.
Hello Guido,
Thank you very much for this intersting article. I have been posting similar things in Forums (e.g. ADVrider: http://disq.us/p/26vrn3d) for several years now because many people seem to confuse the numbers given by manufacturers, and they don’t quite understand how they are related and how they translate to how a bike accelerates.
In my view, this topic is becoming more and more relevant since some of the EU countries, especially Germany and Austria, are carrying out a “witch hunt” against motorcyclists to end excessive noise emissions.
High revving engines produce lots of noise, so I actually get where the non-motorcyclists are coming from. I get pretty unnerved myself when a young guy on a 600cc supersport bike with 3cm chicken strips crawls through a bend, just to open up the throttle and blast up the mountain pass doing 15000RPM. That’s why I didn’t find it surprising that 600cc supersport bikes temporarily died out with EURO 4 regulations, seeing that they used to produce about 130PS/128HP before the regulations came into effect.
As you said, having more torque down low in the rev range means that you don’t need high revs to achieve the acceleration you want, and this means you potentially ride a lot quieter. This, in turn, helps keep residents happy and nice roads open.
Overall a good explanation although I think your motorcycle A and B comparison is flawed. With the same everything except torque, the bike with more torque WILL accelerate faster. The low torque bike will not be able to rev higher and anyway with the same gearing it cannot get more torque to the rear wheel than the other.
You also omitted to mention that manufacturers quote crank figures as they have the ability to reliably and repeatedly measure the real Brake HorsePower of an engine in that way. A rear wheel dyno does not actually measure power. It just measures the acceleration of a drum of known weight and inertia and then compares that to a chart of figures from an engine of known power and extrapolates that to produce the figures that motorcycle journalists (and other ignorami) hold sacrosanct. It’s a very vague and inaccurate process whose only real value is to compare 2 vehicles (or same vehicle with mods being compared) on the same day in the same ambient conditions. The further you vary from those restrictions, the less valid the results.
Also, in real world riding on the road, power is essentially meaningless and the owner of a modern superbike will NEVER see it make the 200+ hp that it may be able to produce. That will ONLY occur in the steady state condition with WOT, in top gear, at the engine rpm for max. torque and unable to go any faster. Any less than that it’s making WAY less power (most riding uses less than 40 hp) so its max. power capability is entirely irrelevant. What WILL make it seem fast (or not) is torque. Torque is what riders feel making the bike accelerate, but mistake that for power. Power is just a calculated mathematical figure with little relevance to performance, apart from max. speed. Road riders need to forget power and just concentrate on torque and how the engine produces it.
Best way to think of it is that torque provides the acceleration, but max power determines the top speed.
As you said, the Verge TS makes great torque (helped by the large diameter of its motor), but without a gearbox, that’s all you get, whereas an ICE powered bike can make more by gearing down the engine. So the TS puts less torque to the ground than a 1250GS – in first gear. I’ve not done the maths for this particular comparison, but I’m 99% sure however that the TS will be making more than the GS in 2nd and for each higher gear the GS will fall further and further behind. A bike in second can accelerate very quickly. 1st is only really needed to get moving, due to the poor characteristics of an ICE. But imagine a bike that accelerates from 0 mph, as rapidly as the aforementioned GS can do in second at the rpm of max.torque (obviously just a very brief peak and impossible to maintain), but continues with that same relentless urge all the way to max. speed. It’s an intoxicating thought.
Thanks for the excellent and insightful addition Ken! Also good point about my A-B example being flawed. I forgot about the ‘all else is equal’ restriction for a bit, which I imposed myself 🙂. Cheers!!!
A number of things.
Ken – the A/B example is OK as far as it goes. Remember B has twice the torque but the same peak power therefore the redline must be half that of bike A. In first B accelerates at twice the rate of A but soon gets to its redline and has to change to second, slowing acceleration while B continues in first and so on through the gears. For the bikes to have the same gearing that gearing has to be massively sub-optimal on one or both bikes. Suppose both bikes have gearing that’s ideal for B then B will romp through the gears and quickly arrive at 150mph. A however will chug along in first gear and will only just get into second gear at 150mph (and instantly lose speed again). A’s engine can spin twice as fast as B’s so through the same gearing A can go twice as fast as B. Top gear is typically about twice the ratio of first gear so when B revs out in top, A has only just finished first gear. If both bikes have gearing that’s optimised for A then B will be really short geared. It will romp through the gears even faster but when it revs out in top it’ll only be going 75mph and won’t be able to go any faster. At this point bike A will be way behind but will soon catch up and overtake.
Your view on torque isn’t quite correct. ‘Torque is what riders feel making the bike accelerate’ only if they can’t be bothered to change gear. By changing down gears you multiply the torque and the acceleration and not coincidentally increase the power the engine’s putting out. It’s clear that accelerating a lump of metal is doing work and the rate of acceleration is proportional to the rate of work so more acceleration means more power expended. If the two bikes A and B each have gearing optimised for their engines then they will accelerate at pretty much the same rate to their top speeds but all the time A’s engine will be screaming away at twice the pitch of B’s
But the real point of this post is to question the Verge TS torque figure. My 2000 R1 has peak torque at the back wheel of 512Nm in top gear (108Nm*1.58*1.115*2.688). This is enough to push it through the air at 180mph. So if the Verge really has 1000Nm, independent of motor revs, shouldn’t it have a top speed of 180*SQRT(1000/512)=250mph? This is why we really need your article about where electric motorcycle power and torque figures come from, Guido.
Parts of this article are OK, other parts completely incorrect.
The most glaringly wrong statement is this: ” Motorcycle A has 50 Nm Torque, while motorcycle B has 100 Nm of Torque. What does this mean? Well, this means that motorcycle B can accelerate twice as fast at the same rev range. ” Given well-designed gearing and 6 speeds or so, acceleration is determined by only one ratio: HP to weight.
The losses for each gear reduction are typically 4 percent, so from crank through primary, gearbox and final drive there are three reductions, each 96% efficient. .96 x .96 x .96 is 88%. These are the same for a “torquey” bike vs a “peaky” bike. so we can ignore them. Then, if the two bikes have identical HP, the one with 100 nm torque produces that HP at half the rpm of the other bike. Therefore, the big torque bike will be geared with half the total reduction as the other, to produce equivalent top speeds. Thus, in each gear, the rear wheel torque will be the same, because the difference in gearing precisely cancels the difference in crankshaft torque.
The electric motorcycle people are deliberately confusing the issue, because for most, there is no separate transmission, and often not even a primary reduction. The torque of the motor is effectively countershaft torque, which on a petrol-fueled bike is apt to be 4 times engine torque, depending upon the gear selected (in first gear, even higher).
The relevant spec that performance-oriented electric motorcycle manufactures should be quoting is HP, plain and simple. A 50 HP motorcycle will accelerate like any other 50 hp motorcycle (given equal weights, etc), whether it is a racy 250cc (engine turning at 18,000 rpm), a typical 500cc road bike (engine turning at 8,000 rpm), or an electric motorcycle of 50 hp (motor turning at 3000 rpm).
(The ability to deliver that 50 HP to the rear wheel in constant fashion, differs mainly with the number of transmission speeds — more is better. An engine only produces its rated hp at one rpm, but many engine/transmission combinations are such that the HP can be at least close to constant, given full throttle and fast, appropriate shifts. Electric motors have an advantage here, because they can be programmed to run as constant HP devices… so there is no falloff in power around the shift points.)
The Zero DS has a peak torque of 78 lb ft. That is a big number, so that is what they publish in huge font. However the motors is only 46 hp, and that is the reason that the top speed is only 98 mph. For contrast, a 600cc crotch rocket has “only” 40 lb ft crankshaft torque, but 100 hp. So they are far faster than the Zero, and accelerate far better.
Confusingly, motorcycle magazines, etc, will quote “rear wheel torque” and produce a figure only slightly *smaller* than manufacturer’s crankshaft torque. (It should be something like ten times *bigger*.) What this means is that the torque value was measured at the rear wheel, but that the math has been done to translate that into crankshaft torque. (The actual rear wheel torque will be the engine torque multiplied by primary ratio, selected gear ratio, and final drive ratio, so that the rear wheel torque can be ten times the crankshaft torque. But the rear wheel rpm will also be 10 times lower that crank rpm… so hp is (in approximate theory) the same at crankshaft, input shaft, output shaft, counter shaft, rear wheel… the difference is the small loss from each gear mesh and from bending a chain or belt, all of which goes off as waste heat, instead of propulsive power.)
I have one doubt that in motorcycle specification OEM specify torque . That specified torque is on countershaft or on wheel of motorcycle?
Countershaft
You’ll notice that quite often a 1000lb ft of electric torque compares to 200-250lb ft of torque on an ice motorcycle. This because most 1st gear ratios are roughly 4:1 ratios (not including other gear reductions).
When they measure the torque of an ice motorcycle, it’s often done in 4th to 5th gear, where there is as close to a 1:1 gear ratio as possible.
The end user doesn’t really give a crap about the math between the two. They care how quick one can get from 0-60.
And had one motorcycle a cvt, or perfect geared dual clutch system, with next to zero time between shifts, acceleration between electric bikes, and ice bikes that have torque figures multiplied by the gear ratios, show that they both are equal in respect to acceleration.
The torque figures of an electric don’t lie, because they often are direct drive, or use only very few gears.
So the closest you can go in math between the both of them, is multiply the rated torque of the ice bike (a measurement usually done in 4th gear), with it’s 1st gear ratio. Usually that is around x4 or x5.